
Before continuing with the state machine, first I need to thank all the mailing list members. You guys really rock. When I asked for state machine diagraming tool suggestions, you guys sent me enough options for an entire (future) post to compare them.
The Code
Here’s the code as of the time I write this article. I would recommend you check the GitHub repository for the latest. I won’t update this post as the code changes.
//retropie-pwr-cntrl-v4.ino
// This code expects a SPST slide switch
// For more information, visit baldengineer.com and search "SNES"
// Arduino Leonardo Pin Names
// Constants
const byte loadEnable = A1; // The Pi!
const byte offSignalPath = A3; //PF4 Verify: no additional Z, adc 4 on 32u4
const byte switchSense = A2; //PF5
const byte signalToPi = A5;// PF0 (is HeartBeat on Pi)
const byte signalFromPi = 3; //PD0 is SCL
const byte heartBeatLED = 6;
const byte frontLED = A4; // PF1
// Extra Pins
const byte debugLED = 12;
const byte extraA1 = A1; // PF6, Mine: A4 - Actually A1
const byte switchLED = A0; // PD6 (debug signal)
#define enableON HIGH
#define enableOFF LOW
// Timers
unsigned long previousOFFSignalCount = millis();
unsigned long previousOFFSignalInterval = 1000;
unsigned long heartBeatPreviousMillis = millis();
unsigned long heartBeatInterval = 500;
bool heartBeatState = true;
unsigned long timerOffPreviousMillis = millis();
unsigned long timerOffInterval = 15000;
unsigned long capDrainPreviousMillis = millis();
unsigned long capDrainInterval = 1000;
unsigned long forcePowerOff = millis();
unsigned long forcePowerOffInterval = 45000UL;
bool forcePowerOffState = false;
bool currentButtonState;
bool previousButtonState;
bool currentPiSignalState;
bool previousPiSignalState;
enum controllerStates {
POWER_UP,
BOOTING_PI,
BOOTED,
SHUT_DOWN_PI,
POWER_DOWN
};
enum controllerStates controllerState = POWER_UP;
enum controllerStates previousControllerState = controllerState;
void setup() {
Serial.begin(9600); // debugging
//pinMode(debugLED, OUTPUT);
pinMode(offSignalPath, INPUT);
pinMode(heartBeatLED, OUTPUT);
pinMode(switchSense, INPUT);
pinMode(signalFromPi, INPUT);
// Don't want signal to go high until Pi has power
pinMode(signalToPi, OUTPUT);
digitalWrite(signalToPi, LOW);
// Not ready to turn on the Pi yet
pinMode(loadEnable, OUTPUT);
digitalWrite(loadEnable, enableOFF);
}
void heartBeat(unsigned long millisTime) {
if (millisTime - heartBeatPreviousMillis >= heartBeatInterval) {
heartBeatState = !heartBeatState;
digitalWrite(heartBeatLED, heartBeatState);
heartBeatPreviousMillis = millisTime;
}
}
void stateDebug() {
if (previousControllerState != controllerState) {
Serial.println(controllerState);
previousControllerState = controllerState;
}
}
void loop() {
// blink the LED
heartBeat(millis());
// check where the Pi is at
currentPiSignalState = digitalRead(signalFromPi);
if (previousPiSignalState != currentPiSignalState) {
// in case has some noise wait and re-sample
delay(10);
currentPiSignalState = digitalRead(signalFromPi);
previousPiSignalState = currentPiSignalState;
}
// how is the button doing?
currentButtonState = digitalRead(switchSense);
if (previousButtonState != currentButtonState) {
// in case of bounce, wait and re-sample
delay(20);
currentButtonState = digitalRead(switchSense);
previousButtonState = currentButtonState;
// let the Pi know if it should be on or off
digitalWrite(signalToPi, currentButtonState);pi
if (currentButtonState == LOW) {
// user is forcing shutdown, so start emergency timer
//timerOffPreviousMillis = millis();
pinMode(offSignalPath, OUTPUT);
digitalWrite(offSignalPath, HIGH);
forcePowerOff = millis();
} else {
// Let the switch keep the cap charged
pinMode(offSignalPath, INPUT);
}
}
switch (controllerState) {
case POWER_UP:
stateDebug();
// disable heart beat
heartBeatPreviousMillis = millis();
heartBeatState = false;
// should be a no brainer.
if (currentButtonState) {
//pwrButtonState = SW_ON;
controllerState = BOOTING_PI;
}
break;
case BOOTING_PI:
//stateDebug();
heartBeatInterval = 1000;
// Turn on the Pi
digitalWrite(loadEnable, enableON);
// wait for Pi to boot
if (currentPiSignalState) {
controllerState = BOOTED;
}
// kill the power if the Pi never boot (or we never)
// get our PiAlive signal.
if (currentButtonState == LOW) {
capDrainPreviousMillis = millis();
digitalWrite(signalToPi, LOW);
controllerState = POWER_DOWN;
}
break;
case BOOTED:
//stateDebug();
heartBeatInterval = 500;
// wait for Pi signal that it is shutting down
if (currentPiSignalState == LOW) {
// Pi Initiated Shutdown
timerOffPreviousMillis = millis();
forcePowerOff = millis();
controllerState = SHUT_DOWN_PI;
}
if (currentButtonState == LOW) {
// User is telling Pi to shut down.
timerOffPreviousMillis = millis(); // moved to switch change
forcePowerOff = millis();
controllerState = SHUT_DOWN_PI;
} else {
// let the swtich keep the cap up.
pinMode(offSignalPath, INPUT);
}
break;
case SHUT_DOWN_PI:
//stateDebug();
heartBeatInterval = 250;
// give the Pi some time to finish up its power-down
if (currentPiSignalState == LOW) {
if (millis() - timerOffPreviousMillis >= timerOffInterval) {
controllerState = POWER_DOWN;
capDrainPreviousMillis = millis();
}
}
// or a reboot is occured
if (currentPiSignalState) {
controllerState = BOOTED;
}
// Shutdown took way too long
if (millis() - forcePowerOff >= forcePowerOffInterval) {
controllerState = POWER_DOWN;
capDrainPreviousMillis = millis();
}
break;
case POWER_DOWN:
//stateDebug();
heartBeatInterval = 100;
// let the cap drain once the switch goes off.
if (currentButtonState == LOW) {
// turn off the Pi
digitalWrite(loadEnable, enableOFF);
if (millis() - capDrainPreviousMillis >= capDrainInterval) {
// drain the cap
pinMode(offSignalPath, OUTPUT);
digitalWrite(offSignalPath, LOW);
}
}
break;
}
}
The State Machine
It took me several sessions to get the state machine to work correctly. On the left is the original state machine I developed and on the right is the re-designed code.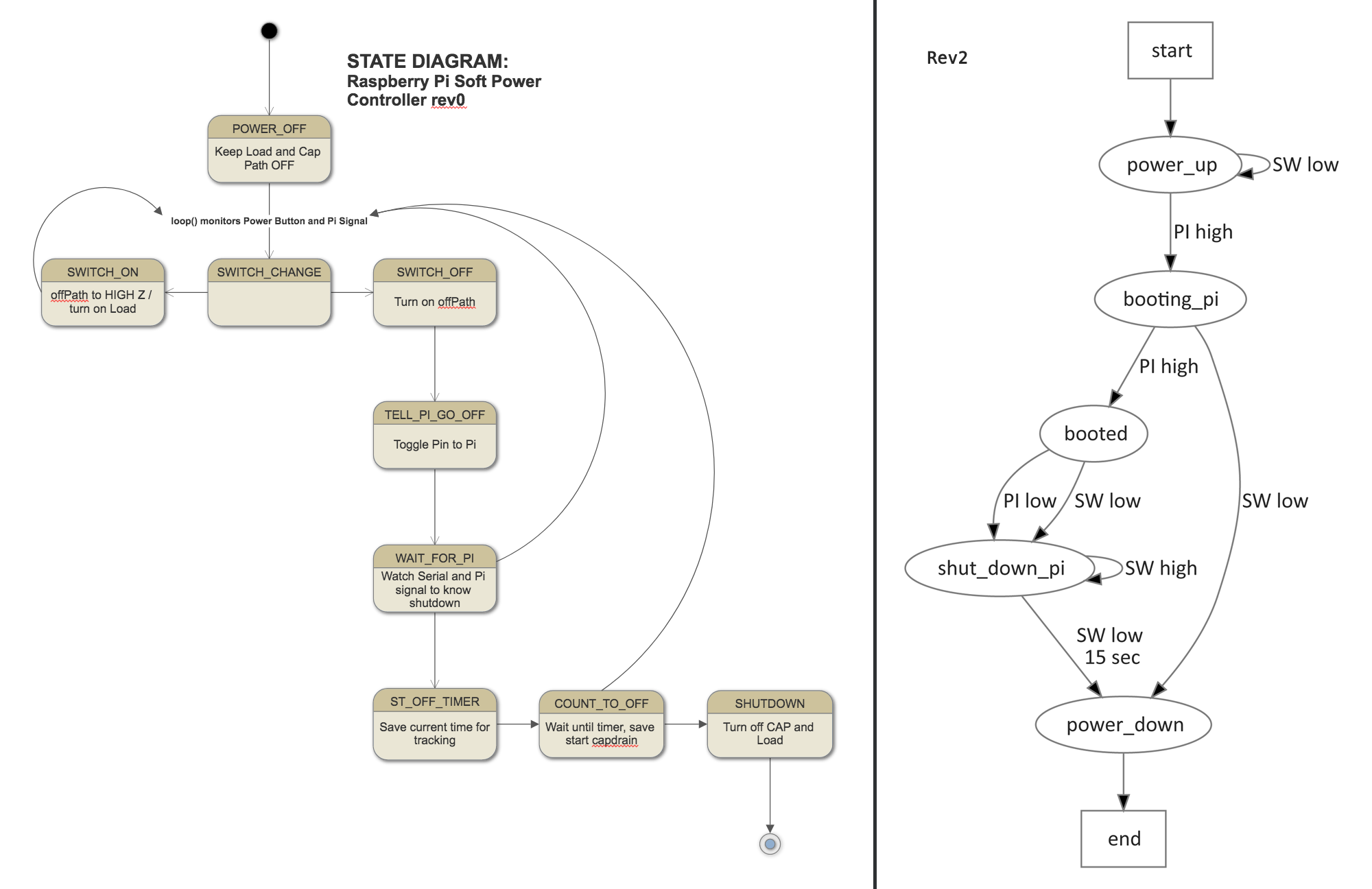 I asked the mailing list for suggestions on drawing a state diagram. I received many good suggestions, in fact, enough I plan a post on it. In the end, though, I ended up using “dot”, which is part of GraphViz.
I asked the mailing list for suggestions on drawing a state diagram. I received many good suggestions, in fact, enough I plan a post on it. In the end, though, I ended up using “dot”, which is part of GraphViz.


2 Comments
Other background reading, with links to other similar projects here:- http://projects.descan.com/stuff/Project-iSwitchPi-en.pdf
Yeah, I found this originally when I started doing my research. I found the board to be ridiculously over-designed and complicated to use. But it has two positives: it is very flexible AND it only requires a single GPIO pin.