
/etc/rc.d doesn’t matter!
It turns out, Raspbian Jessie does not use SysV for init (anymore). So it does not matter what you scripts you put in /etc/rc.d. Pretty simple but missed by many! Here is a correct Raspberry Pi Startup Script Tutorial.The Key is systemd
Once I started researching how to make systemd do what I wanted, new problems emerged. The syntax for systemd is not as straightforward as I first thought. Thanks to readers, I was pointed towards the RedHat systemd manual. After reviewing it, I was able to create a service that runs at startup and shutdown. In the end, I was unable to prevent this process from running during reboot. There seem to be some more layers to make sure systemd knows the difference. In the end, I decided it was not necessary to avoid the reboot.systemd configuration
There are two systemd services necessary for my RetroPie controller to work. The first service for the Raspberry Pi startup script tutorial runs a script (or program) at startup and shutdown. The next service runs in the background watching a GPIO pin.Raspberry Pi Startup Script Tutorial: powercontrol-com.service
Here is the first systemd configuration file.
# Put this file in /etc/systemd/system
# then run sudo systemctl enable powercontrol-coms.service
# on startup, GPIO signal will go high
# on shutdown/reboot, GPIO signal will go low
[Unit]
Description=Retropie Pi Power Controller
Before=network.target
After=umount.target
[Service]
Type=oneshot
ExecStart=/usr/local/bin/c-start
ExecStop=/usr/local/bin/c-stop
RemainAfterExit=yes
[Install]
WantedBy=multi-user.target
sudo systemctl enable powercontrol-coms.service. I found you need to reboot before it works both during a startup and shutdown.
Here’s how the file works, as I understand it.
[Unit]
[Unit]
Description=Retropie Pi Power Controller
Before=network.target
After=umount.target
Fun fact: The process should not be called ‘unmount.’ It took me a little bit to understand what it does. I mean, how could anything run after the root file system was unmounted? Well, it is because it is not. Instead, systemd (and even SysV) remounts the filesystem as read-only! (Totally makes sense, right?)
[Service]
[Service]
Type=oneshot
ExecStart=/usr/local/bin/c-start
ExecStop=/usr/local/bin/c-stop
RemainAfterExit=yes
[Install]
[Install]
WantedBy=multi-user.target
Other service: shutdown-gpio.service
I will not go through this service line-by-line. Its function is to launch the background program that monitors the GPIO pin. I tried for a bit to combine the two, but could never get the configuration right. I found it was better to split them apart.
# Put this file in /etc/systemd/system
# then run sudo systemctl enable shutdown-gpio.service
# on startup this will call /usr/local/sbin/c-watch and
# check once per second if the controller gave us the powerdown
# signal. Then forces a reboot.
[Unit]
Description=Watch GPIO pin for when to shutdown
Before=network.target
[Service]
Type=simple
ExecStart=/usr/local/sbin/c-watch
ExecStop=/bin/true
RemainAfterExit=yes
[Install]
WantedBy=multi-user.target
sudo systemctl enable shutdown-gpio.service to activate it.
In the case of the RetroPie, I have two simple compiled programs that toggle GPIO pin on the Raspberry Pi.
Shutdown Raspberry Pi with GPIO Pin
Over on the RPSPC GitHub repository, I have already written up instructions on how to compile c-start, c-stop, and c-watch. I’m not going go into detail on this post because I might cover wiringPi later in the future. However, I did want to show the code I’m using to detect an external signal to start the shutdown.C-watch: Raspberry Pi C GPIO Program
</pre>
<pre>#include <wiringPi.h>
#include <stdio.h>
#include <unistd.h>
#include <linux/reboot.h>
int ioPin = 7; // GPIO04, physical pin 7
int main (void) {
wiringPiSetup ();
pinMode (ioPin, INPUT);
printf("c-watch v0 is now running.\n");
while(1) {
pullUpDnControl(ioPin, PUD_DOWN);
if (!digitalRead(ioPin)) {
printf("LOW\n");
break;
}
delay(1000);
}
printf("Got signal, starting shutdown.\n");
// Would like to change to dbus at some point
system("shutdown -P now");
delay(500);
return 0;
}</pre>
<pre>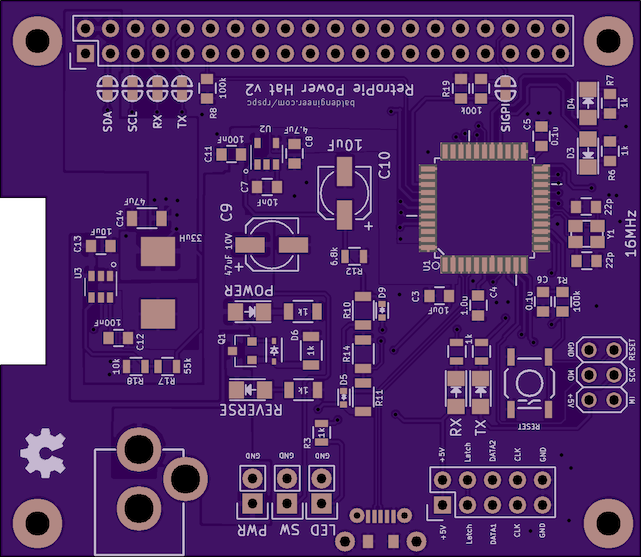


6 Comments
I’ve got the following in my .service file and for some reason the pi will at times freeze up on shutdown or restart with the message “a stop job is running for dhcpcd on all interfaces” Im not sure what part of my service file is causing this. Or maybe something thats part of the python file that it eventually kicks off.
[Unit]
Description=Turns off LED’s on shutdown.
[Service]
Type=oneshot
RemainAfterExit=true
ExecStart=/bin/true
ExecStop=/home/pi/scripts/shutoff.sh
[Install]
WantedBy=multi-user.target
When I did my scripts, I found I had to put them in public directories. Keeping them in a user’s home directory caused me problems. That’s why I moved things to /usr/local/bin. Also, you’re missing the Before/After in Unit, so I am not sure where/when systemctl is going to run your script.
Thanks James!!
I moved the shell script and added the before/after bit and it seems to have resolved the issue.
Really appreciate your time.
Bill
Slight typo: ‘the “ExecStart” parameter is what will run during shutdown‘. Should be ExecStop
This is so interesting; I find it hard to believe that there is no cut and dry way to reset a pi. I will keep this tutorial in mind as I am sure I will need to use something like this in the future.
Yeah, I am planning to add a hard ‘reset” to my power controller: cycle its power.